Ένα μικρό βήμα πιο κοντά σε καθαρότερους ωκεανούς φιλοδοξεί να μας φέρει ένα τεχνολογικό έργο που υποστηρίζεται από την Ε.Ε. Όπως σημειώνει το περιοδικό τεχνολογίας της Ευρωπαϊκής Επιτροπής Cordis, σήμερα 66 εκατομμύρια τόνοι απορριμμάτων έχουν μολύνει τους ωκεανούς μας, με τη συντριπτική πλειονότητά τους να βρίσκεται στον πυθμένα τους.
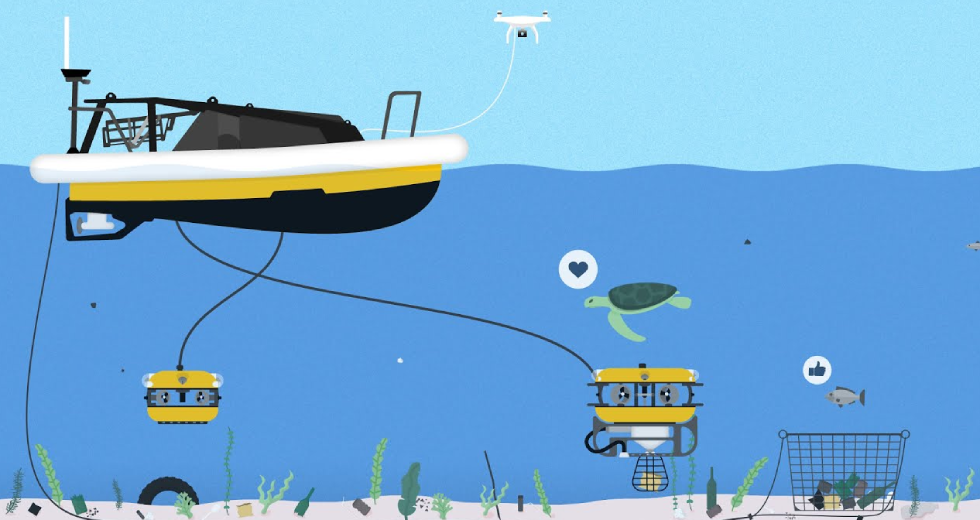
Έτσι, ερευνητές από το χρηματοδοτούμενο από την Ε.Ε. έργο SeaClear αναπτύσσουν μια λύση βασισμένη στην τεχνητή νοημοσύνη για τον καλύτερο καθαρισμό του βυθού των ωκεανών χωρίς να τίθενται σε κίνδυνο οι ζωές δυτών. Η λύση επικεντρώνεται στην αυτοματοποίηση της διαδικασία αναζήτησης, εντοπισμού και συλλογής θαλάσσιων απορριμμάτων χρησιμοποιώντας αυτόνομα ρομπότ που λειτουργούν συνεργατικά. Το σύνολο του πιλοτικού, προς το παρόν, συστήματος απαρτίζεται από ένα σκάφος, ένα drone, δύο υποβρύχια ρομπότ και ένα καλάθι συλλογής. Το μη επανδρωμένο σκάφος σαρώνει τον βυθό της θάλασσας χρησιμοποιώντας ένα ραντάρ τύπου σόναρ που ονομάζεται ηχογράφημα πολλαπλών ακτίνων και εντοπίζει τους μεγάλους όγκους σκουπιδιών.
Αναπτύχθηκε από τον συνεργάτη του έργου SeaClear, την εταιρεία Subsea Tech στη Γαλλία, και βασίζεται στη λογική ότι το σκάφος χρησιμεύει ως το μητρικό πλοίο του συστήματος και όλα τα άλλα ρομπότ επικοινωνούν μαζί του. Αρχικά, όταν το νερό είναι αρκετά καθαρό, ένα drone αναζητά μεγάλες μάζες απορριμμάτων που μπορούν να αναγνωριστούν από τον αέρα. Υποβρυχίως, ένα μικρό ρομπότ παρατήρησης χρησιμοποιεί κάμερα και σόναρ για να σαρώσει τον βυθό της θάλασσας για μικρότερα απορρίμματα. Στη συνέχεια, ένα δεύτερο, πολύ μεγαλύτερο υποβρύχιο ρομπότ συλλέγει τα απορρίμματα με μια ειδικά κατασκευασμένη δαγκάνα που ενσωματώνει μια συσκευή ισχυρής αναρρόφησης για να βοηθήσει στη συλλογή βαριών ή μερικώς θαμμένων στον βυθό απορριμμάτων. Επιπροσθέτως, μικρά ανοίγματα στην αρπάγη διασφαλίζουν ότι οι μικροί θαλάσσιοι οργανισμοί που ενδέχεται να παγιδευτούν κατά λάθος σε αυτήν δεν θα υποστούν βλάβες. Ακολούθως το ρομπότ τοποθετεί κάθε κομμάτι απορριμμάτων που έχει μαζέψει σε ένα μεγάλο καλάθι που έχει εναποθέσει νωρίτερα στον πυθμένα. Το καλάθι μάλιστα είναι ειδικά σχεδιασμένο για να εμποδίζει τα σκουπίδια να διαφεύγουν πίσω στο νερό.
Η πρώτη επίσημη δοκιμή του νέου ρομποτικού συστήματος έγινε τον Μάιο του 2022, οπότε η SeaClear χρησιμοποίησε το πρωτότυπό της στο λιμάνι του Αμβούργου, ενώ ο πρώτος δοκιμαστικός γύρος είχε πραγματοποιηθεί στο Ντουμπρόβνικ της Κροατίας, τον Σεπτέμβριο του 2021. Μια πόλη όπου η υποβρύχια ορατότητα ήταν σχετικά καλή οπότε η επιστημονική ομάδα βελτίωσε τα διάφορα ρομποτικά εξαρτήματα με στόχο να λειτουργούν ως ενιαίο σύστημα. Ωστόσο, το Αμβούργο, σημειώνει το Cordis, παρείχε εντελώς διαφορετικές συνθήκες δοκιμών και προκλήσεις από το Ντουμπρόβνικ. Η πολύ χαμηλότερη υποβρύχια ορατότητά του (συχνά λιγότερο από μερικά εκατοστά) και η μεγάλη κίνηση από εμπορικά πλοία κατέστησαν προβληματική τη χρήση καμερών για τον εντοπισμό των απορριμμάτων και οι ερευνητές βασίστηκαν μόνο στους αισθητήρες των σόναρ. «Τώρα τελειοποιούμε το όλο σύστημα και ειδικά τα σόναρ, εντάσσοντάς τα πάντα σε μια βάση δεδομένων» τόνισε ο δρ Στέφαν Σοσνόφσκι από το Τεχνικό Πανεπιστήμιο του Μονάχου και συνεργάτης του έργου SeaClear.
Δεδομένου ότι το τεστ του Αμβούργου δοκίμασε την ενσωμάτωση πρωτότυπων εξαρτημάτων, το σύστημα δεν έχει λειτουργήσει ακόμη εντελώς αυτόνομα. Ωστόσο, οι ερευνητές δήλωσαν αρκετά ικανοποιημένοι με την τελευταία προσπάθεια στο γερμανικό λιμάνι, η οποία ήταν ακόμη μια δοκιμή για το SeaClear (αναζήτηση, ταυτοποίηση και συλλογή θαλάσσιων απορριμμάτων με αυτόνομα ρομπότ), με το σύστημα να αναμένεται να λειτουργήσει πλήρως τον Δεκέμβριο του 2023. Αξίζει τέλος να σημειωθεί ότι υπάρχουν ήδη πολλά μικρά ρομπότ-καθαριστές του βυθού, αλλά αυτό το έργο της SeaClear είναι πολύ πιο αποδοτικό, καθώς μεταφέρει πολύ μεγαλύτερους όγκους σκουπιδιών.